Vehicle Dynamics Control System
Introduction
Developed a vehicle dynamics model and tire model.
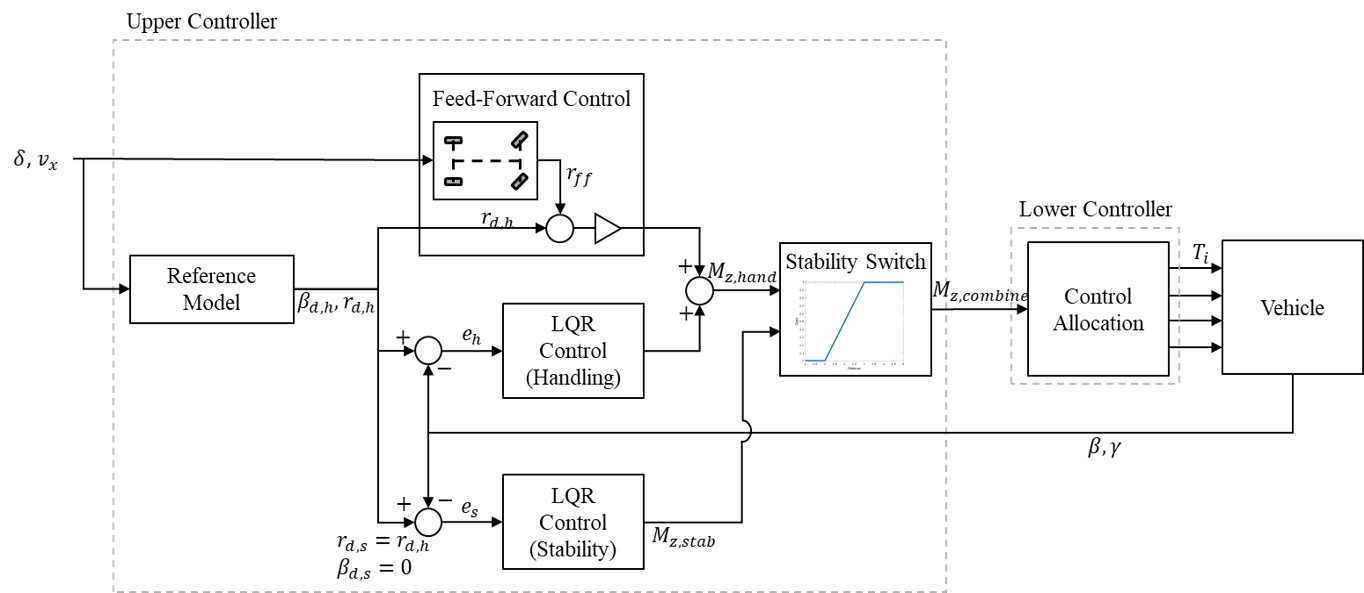
Applied Support Vector Machine to identify stability regions and designed a feed‑forward plus LQR torque vectoring controller with quadratic programming torque distribution.
The controller improves steering linearity and handling during normal driving and automatically switches to stability control near the loss‑of‑control limit.
Skills Learned
- Vehicle dynamics
- Model‑based control
- Machine learning
- MATLAB/Simulink
- Carsim
- Software‑in‑the‑loop testing